محققان دانشگاه دوک از یک پیشرفت پیشگامانه در فناوری سنجش روباتیک پرده برداری کرده اند که می تواند نحوه تعامل روبات ها با محیط خود را به طور اساسی تغییر دهد. سیستم نوآورانه، به نام SonicSenseرباتها را قادر میسازد تا محیط اطراف خود را از طریق ارتعاشات صوتی تفسیر کنند، که تغییر قابل توجهی را از ادراک روباتی مبتنی بر بینایی سنتی نشان میدهد.
در رباتیک، توانایی درک دقیق و تعامل با اشیاء همچنان یک چالش حیاتی است. در حالی که انسان ها به طور طبیعی چندین حواس را برای درک محیط خود ترکیب می کنند، ربات ها در درجه اول بر داده های بصری تکیه کرده اند و توانایی آنها را برای درک کامل و دستکاری اشیا در سناریوهای پیچیده محدود می کند.
توسعه SonicSense نشان دهنده یک جهش به جلو در پر کردن این شکاف است. این فناوری جدید با ترکیب قابلیتهای سنجش صوتی، رباتها را قادر میسازد تا اطلاعات دقیقی درباره اشیاء از طریق تعامل فیزیکی جمعآوری کنند، مشابه اینکه انسانها به طور غریزی از لمس و صدا برای درک محیط اطراف خود استفاده میکنند.
شکست فناوری SonicSense
طراحی نوآورانه این سیستم حول یک دست رباتیک مجهز به چهار انگشت متمرکز شده است که هر یک حاوی یک میکروفون تماسی است که در نوک انگشت خود تعبیه شده است. این حسگرهای تخصصی ارتعاشات ایجاد شده در طول فعل و انفعالات مختلف با اشیاء مانند ضربه زدن، گرفتن یا تکان دادن را ضبط می کنند.
چیزی که SonicSense را متمایز می کند، رویکرد پیچیده آن برای سنجش آکوستیک است. میکروفن های تماسی به طور خاص برای فیلتر کردن نویزهای محیطی طراحی شده اند و از جمع آوری داده های تمیز در طول تعامل با اشیا اطمینان حاصل می کنند. همانطور که جیاکسون لیو، نویسنده اصلی این مطالعه، توضیح میدهد، «ما میخواستیم راهحلی ایجاد کنیم که بتواند با اشیاء پیچیده و متنوعی که به صورت روزانه یافت میشوند کار کند و به روباتها توانایی بسیار غنیتری برای «احساس» و درک جهان بدهد.
دسترسی به سیستم به ویژه قابل توجه است. تمام این راهاندازی که با استفاده از اجزای تجاری موجود، از جمله میکروفنهای تماسی مشابه که توسط نوازندگان برای ضبط گیتار استفاده میشود، و ترکیب عناصر چاپشده با سه بعدی ساخته شده است، هزینه کل آن چیزی بیش از 200 دلار است. این رویکرد مقرون به صرفه، فناوری را برای پذیرش گسترده و توسعه بیشتر در دسترس تر می کند.
پیشرفت فراتر از تشخیص بصری
سیستمهای روباتیک مبتنی بر بینایی سنتی با محدودیتهای متعددی مواجه هستند، بهویژه هنگامی که با سطوح شفاف یا بازتابنده یا اجسامی با هندسه پیچیده سروکار دارند. همانطور که پروفسور بویان چن اشاره می کند، “در حالی که بینایی ضروری است، صدا لایه هایی از اطلاعات را اضافه می کند که می تواند چیزهایی را که چشم ممکن است از دست بدهد را آشکار کند.”
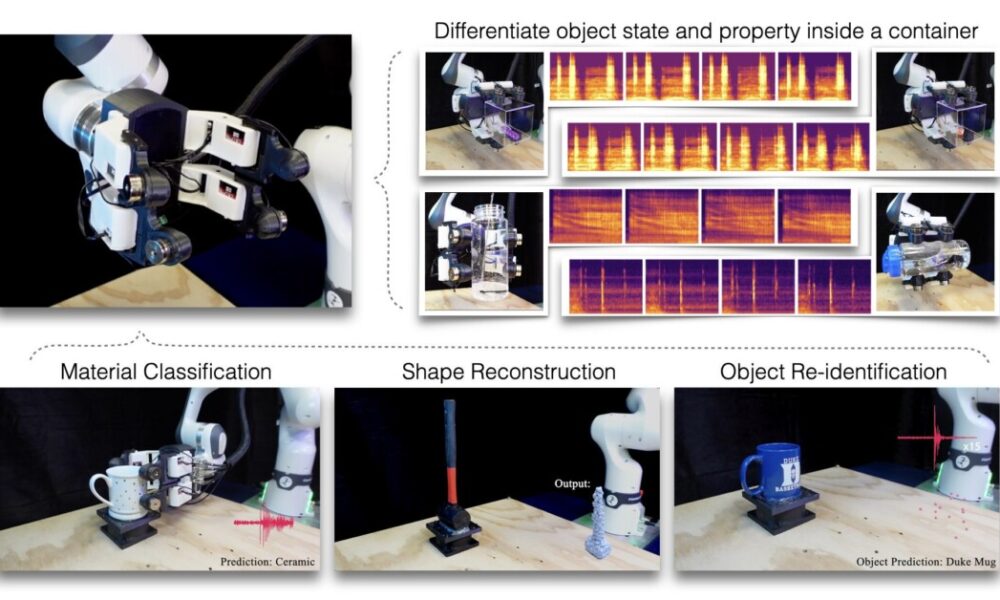
SonicSense با رویکرد چند انگشتی و ادغام هوش مصنوعی پیشرفته بر این محدودیت ها غلبه می کند. این سیستم می تواند اشیاء متشکل از مواد مختلف را شناسایی کند، اشکال هندسی پیچیده را درک کند، و حتی محتویات ظروف را تعیین کند – قابلیت هایی که برای سیستم های تشخیص بصری معمولی چالش برانگیز است.
توانایی این فناوری برای کار با چندین نقطه تماس به طور همزمان امکان تجزیه و تحلیل اشیاء جامع تری را فراهم می کند. با ترکیب دادههای هر چهار انگشت، این سیستم میتواند بازسازیهای سهبعدی دقیقی از اجسام بسازد و ترکیب مواد آنها را با دقت تعیین کند. برای اشیاء جدید، سیستم ممکن است به 20 تعامل مختلف نیاز داشته باشد تا به یک نتیجه برسد، اما برای موارد آشنا، شناسایی دقیق را می توان در کمتر از چهار تعامل به دست آورد.
برنامه های کاربردی و آزمایش در دنیای واقعی
کاربردهای عملی SonicSense بسیار فراتر از نمایش های آزمایشگاهی است. این سیستم به ویژه در سناریوهایی که به طور سنتی سیستمهای ادراک رباتیک را به چالش میکشند، مؤثر بوده است. از طریق آزمایش سیستماتیک، محققان توانایی آن را برای انجام وظایف پیچیده مانند تعیین تعداد و شکل تاس در ظرف، اندازهگیری سطح مایع در بطریها و ایجاد بازسازیهای سه بعدی دقیق از اجسام از طریق اکتشاف سطحی نشان دادند.
این قابلیت ها چالش های دنیای واقعی در تولید، کنترل کیفیت و اتوماسیون را برطرف می کند. برخلاف تلاشهای قبلی سنجش آکوستیک، رویکرد چند انگشتی SonicSense و فیلتر نویز محیط، آن را بهویژه برای محیطهای صنعتی پویا که در آن ورودیهای حسی متعدد برای دستکاری و ارزیابی دقیق اشیا ضروری هستند، مناسب میسازد.
تیم تحقیقاتی به طور فعال در حال گسترش قابلیت های SonicSense برای مدیریت تعاملات چند شیء به طور همزمان است. پروفسور چن می گوید: «این تنها آغاز است. در آینده، ما تصور میکنیم که SonicSense در دستهای روباتیک پیشرفتهتر با مهارتهای دستکاری ماهرانه استفاده شود و به روباتها اجازه میدهد کارهایی را انجام دهند که نیاز به حس لامسه ظریف دارند.
ادغام الگوریتم های ردیابی اشیا در حال حاضر در حال انجام است، با هدف این که ربات ها بتوانند در محیط های به هم ریخته و پویا با اشیاء حرکت کنند و با آنها تعامل داشته باشند. این پیشرفت، همراه با برنامههایی برای ترکیب روشهای حسی اضافی مانند سنجش فشار و دما، به قابلیتهای پیچیدهتر دستکاری انسانمانند اشاره دارد.
خط پایین
توسعه SonicSense نشان دهنده نقطه عطف مهمی در درک رباتیک است و نشان می دهد که چگونه حس صوتی می تواند سیستم های بصری را برای ایجاد ربات های توانمندتر و سازگارتر تکمیل کند. همانطور که این فناوری به تکامل خود ادامه می دهد، رویکرد مقرون به صرفه و کاربردهای همه کاره آن آینده ای را نشان می دهد که در آن ربات ها می توانند با محیط خود با پیچیدگی بی سابقه ای تعامل داشته باشند و ما را به قابلیت های رباتیک واقعاً شبیه انسان نزدیکتر کند.

