درک رباتیک مدت هاست که به دلیل پیچیدگی محیط های دنیای واقعی به چالش کشیده شده است، که اغلب به تنظیمات ثابت و اشیاء از پیش تعریف شده نیاز دارد. مهندسان MIT Clio را توسعه داده اند، یک سیستم پیشگامانه که به ربات ها اجازه می دهد تا عناصر مربوطه را در محیط اطراف خود به طور مستقیم درک و اولویت بندی کنند و توانایی آنها را برای انجام کارها به طور موثر افزایش دهد.
درک نیاز به ربات های هوشمندتر
سیستمهای روباتیک سنتی به دلیل محدودیتهای ذاتی در قابلیتهای ادراکشان، با درک و تعامل با محیطهای دنیای واقعی مبارزه میکنند. بیشتر ربات ها برای کار در محیط های ثابت با اشیاء از پیش تعریف شده طراحی شده اند که توانایی آنها را برای انطباق با تنظیمات غیرقابل پیش بینی یا به هم ریخته محدود می کند. این رویکرد تشخیص “مجموعه بسته” به این معنی است که ربات ها فقط قادر به شناسایی اشیایی هستند که به صراحت برای تشخیص آنها آموزش دیده اند و باعث می شود آنها در موقعیت های پیچیده و پویا کمتر موثر باشند.
این محدودیت ها به طور قابل توجهی مانع از کاربردهای عملی ربات ها در سناریوهای روزمره می شود. به عنوان مثال، در یک ماموریت جستجو و نجات، ربات ها ممکن است نیاز به شناسایی و تعامل با طیف گسترده ای از اشیاء داشته باشند که بخشی از مجموعه داده های از پیش آموزش دیده آنها نیستند. بدون توانایی انطباق با اشیاء جدید و محیط های مختلف، مفید بودن آنها محدود می شود. برای غلبه بر این چالشها، نیاز مبرمی به رباتهای باهوشتری وجود دارد که بتوانند به صورت پویا محیط اطراف خود را تفسیر کنند و بر آنچه که مربوط به وظایفشان است تمرکز کنند.
کلیو: رویکردی جدید برای درک صحنه
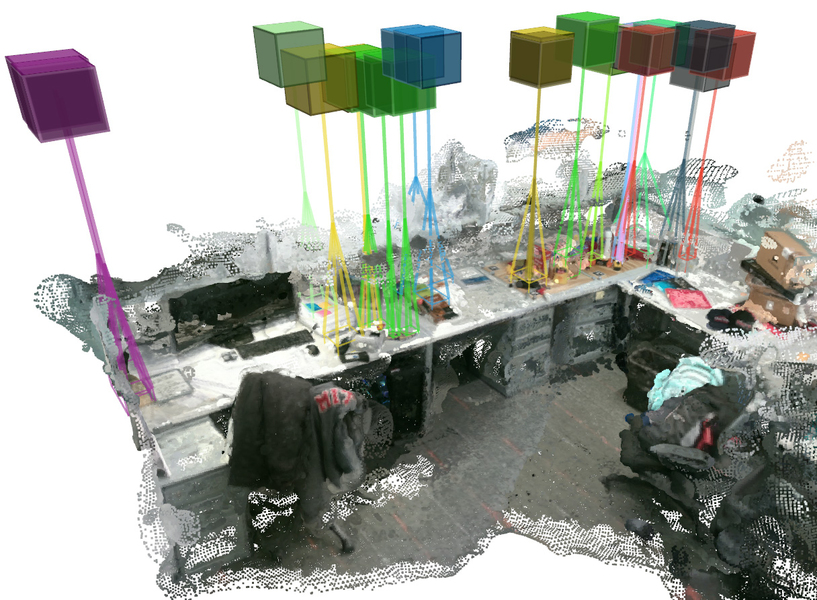
Clio یک رویکرد جدید است که به رباتها اجازه میدهد تا به صورت پویا درک خود از یک صحنه را بر اساس وظیفه در دست تطبیق دهند. بر خلاف سیستمهای سنتی که با سطح ثابتی از جزئیات کار میکنند، Clio به رباتها این امکان را میدهد تا سطح دانهبندی مورد نیاز برای انجام مؤثر یک کار مشخص را تعیین کنند. این سازگاری برای ربات ها برای عملکرد موثر در محیط های پیچیده و غیرقابل پیش بینی بسیار مهم است.
به عنوان مثال، اگر رباتی وظیفه دارد دسته ای از کتاب ها را جابجا کند، Clio به او کمک می کند تا کل پشته را به عنوان یک شی واحد درک کند، و این امکان را برای یک رویکرد ساده تر فراهم می کند. با این حال، اگر وظیفه انتخاب یک کتاب سبز رنگ خاص از پشته باشد، Clio ربات را قادر میسازد تا آن کتاب را به عنوان یک موجودیت جداگانه تشخیص دهد، بدون توجه به بقیه پشته. این انعطافپذیری به رباتها اجازه میدهد تا عناصر مرتبط صحنه را اولویتبندی کنند، پردازش غیر ضروری را کاهش داده و کارایی کار را بهبود میبخشد.
سازگاری Clio توسط پیشرفته ساخته شده است بینایی کامپیوتر و پردازش زبان طبیعی تکنیکهایی که رباتها را قادر میسازد وظایف توصیفشده به زبان طبیعی را تفسیر کرده و ادراک خود را بر این اساس تنظیم کنند. این سطح از درک شهودی به رباتها اجازه میدهد تا تصمیمات معنیداری در مورد اینکه چه بخشهایی از محیط اطرافشان مهم است، بگیرند، و اطمینان حاصل شود که آنها فقط بر روی آنچه برای کار در حال انجام هستند تمرکز میکنند.
تظاهرات دنیای واقعی Clio
Clio با موفقیت در آزمایش های مختلف در دنیای واقعی پیاده سازی شده است و تطبیق پذیری و کارایی آن را نشان می دهد. یکی از این آزمایشها شامل پیمایش در یک آپارتمان به هم ریخته بدون هیچ سازمان یا آمادگی قبلی بود. در این سناریو، Clio ربات را قادر میسازد تا بر اساس وظیفه داده شده، اشیاء خاص مانند انبوهی از لباسها را شناسایی کرده و روی آنها تمرکز کند. با تقسیمبندی انتخابی صحنه، Clio اطمینان حاصل کرد که ربات تنها با عناصر لازم برای تکمیل کار تعیینشده تعامل داشته و به طور موثر پردازش غیرضروری را کاهش میدهد.
نمایش دیگری در یک ساختمان اداری برگزار شد که در آن یک ربات چهارپا مجهز به کلیو وظیفه هدایت و شناسایی اشیاء خاص را داشت. همانطور که ربات ساختمان را کاوش می کرد، کلیو در زمان واقعی کار می کرد تا صحنه را تقسیم کند و یک نقشه مرتبط با کار ایجاد کند و فقط عناصر مهم مانند اسباب بازی سگ یا جعبه کمک های اولیه را برجسته کند. این قابلیت به ربات اجازه می دهد تا به طور موثر به اشیاء مورد نظر نزدیک شده و با آنها تعامل داشته باشد و توانایی Clio را در افزایش تصمیم گیری بلادرنگ در محیط های پیچیده به نمایش بگذارد.
اجرای Clio در زمان واقعی یک نقطه عطف مهم بود، زیرا روش های قبلی اغلب به زمان پردازش طولانی نیاز داشتند. با فعال کردن بخشبندی و تصمیمگیری در زمان واقعی اشیا، Clio فرصتهای جدیدی را برای رباتها باز میکند تا به طور مستقل در محیطهای پویا و به هم ریخته بدون نیاز به مداخله دستی جامع کار کنند.
فناوری پشت کلیو
قابلیت های نوآورانه Clio بر اساس ترکیبی از چندین فناوری پیشرفته ساخته شده است. یکی از مفاهیم کلیدی استفاده از گلوگاه اطلاعاتی است که به سیستم کمک می کند تنها مرتبط ترین اطلاعات را از یک صحنه خاص فیلتر و حفظ کند. این مفهوم، Clio را قادر میسازد تا دادههای بصری را بهطور مؤثر فشرده کند و عناصر حیاتی برای تکمیل یک کار خاص را اولویتبندی کند و اطمینان حاصل کند که جزئیات غیر ضروری نادیده گرفته میشوند.
Clio همچنین بینایی کامپیوتری پیشرفته، مدلهای زبان و شبکههای عصبی را برای دستیابی به بخشبندی مؤثر اشیا ادغام میکند. با استفاده از مدلهای زبانی در مقیاس بزرگ، Clio میتواند وظایف بیان شده به زبان طبیعی را درک کند و آنها را به اهداف درک عملی تبدیل کند. سپس سیستم از شبکههای عصبی برای تجزیه دادههای بصری استفاده میکند و آنها را به بخشهای معنیداری تقسیم میکند که میتوانند بر اساس الزامات کار اولویتبندی شوند. این ترکیب قدرتمند از فناوریها به Clio اجازه میدهد تا محیط خود را به طور تطبیقی تفسیر کند و سطحی از انعطافپذیری و کارایی را فراهم کند که از سیستمهای روباتیک سنتی پیشی بگیرد.
برنامه های کاربردی فراتر از MIT
رویکرد نوآورانه Clio برای درک صحنه، این پتانسیل را دارد که بر چندین کاربرد عملی فراتر از آزمایشگاههای تحقیقاتی MIT تأثیر بگذارد:
- عملیات جستجو و نجات: توانایی Clio در اولویت بندی پویا عناصر مرتبط در یک صحنه پیچیده می تواند کارایی ربات های نجات را به میزان قابل توجهی بهبود بخشد. در سناریوهای فاجعه، رباتهای مجهز به Clio میتوانند به سرعت بازماندگان را شناسایی کنند، در میان زبالهها حرکت کنند و بر روی اشیاء مهم مانند تجهیزات پزشکی تمرکز کنند و پاسخهای مؤثرتر و به موقعتری را ممکن میسازند.
- تنظیمات داخلی: Clio می تواند عملکرد ربات های خانگی را بهبود بخشد و آنها را برای انجام کارهای روزمره مجهزتر کند. به عنوان مثال، رباتی که از Clio استفاده می کند، می تواند به طور موثر یک اتاق به هم ریخته را مرتب کند و بر موارد خاصی تمرکز کند که باید مرتب یا تمیز شوند. این سازگاری به روباتها اجازه میدهد تا در محیطهای خانه کاربردیتر و مفیدتر شوند و توانایی آنها برای کمک به کارهای خانه را بهبود بخشند.
- محیط های صنعتی: رباتها در کف کارخانهها میتوانند از Clio برای شناسایی و دستکاری ابزارها یا قطعات خاص مورد نیاز برای یک کار خاص، کاهش خطا و افزایش بهرهوری استفاده کنند. ربات ها با تنظیم پویا درک خود بر اساس وظیفه ای که در دست دارند، می توانند کارآمدتر در کنار کارگران انسانی کار کنند که منجر به عملیات ایمن تر و ساده تر می شود.
- همکاری ربات و انسان: Clio این پتانسیل را دارد که همکاری ربات و انسان را در این برنامه های مختلف افزایش دهد. Clio با اجازه دادن به روباتها برای درک بهتر محیط خود و اولویتبندی موارد مهم، تعامل انسان با روباتها و تعیین وظایف به زبان طبیعی را آسانتر میکند. این ارتباطات و درک بهتر می تواند منجر به کار تیمی مؤثرتر بین ربات ها و انسان ها شود، چه در مأموریت های نجات، چه در محیط های خانگی و چه در عملیات های صنعتی.
توسعه Clio ادامه دارد و تلاشهای تحقیقاتی بر روی توانمند ساختن آن برای انجام کارهای پیچیدهتر متمرکز شده است. هدف این است که قابلیتهای Clio را برای دستیابی به درک بیشتر در سطح انسانی از الزامات وظایف، توسعه دهد، و در نهایت به روباتها اجازه میدهد تا دستورالعملهای سطح بالا را در محیطهای متنوع و غیرقابل پیشبینی بهتر تفسیر و اجرا کنند.
خط پایین
Clio نشان دهنده یک جهش بزرگ در درک رباتیک و اجرای وظایف است و روشی انعطاف پذیر و کارآمد را برای ربات ها برای درک محیط خود ارائه می دهد. با فعال کردن رباتها برای تمرکز تنها بر آنچه مرتبطتر است، Clio این پتانسیل را دارد که صنایع مختلف از جستجو و نجات تا رباتیک خانگی را متحول کند. با پیشرفتهای مداوم، Clio راه را برای آیندهای هموار میکند که در آن رباتها میتوانند به طور یکپارچه در زندگی روزمره ما ادغام شوند و در کنار انسانها برای انجام وظایف پیچیده به آسانی کار کنند.

