در سالهای اخیر ، هوش مصنوعی (AI) در زمینه های مختلف مانند پردازش زبان طبیعی (NLP) و دید رایانه به طور قابل توجهی پیشرفت کرده است. با این حال ، یک چالش مهم برای هوش مصنوعی ادغام آن در دنیای فیزیکی بوده است. در حالی که AI دارد عالی در استدلال و حل مشکلات پیچیده ، این دستاوردها تا حد زیادی به محیط های دیجیتال محدود شده اند. برای فعال کردن هوش مصنوعی برای انجام وظایف فیزیکی از طریق روباتیک ، باید درک عمیقی از استدلال مکانی ، دستکاری شی و تصمیم گیری داشته باشد. برای رسیدگی به این چالش ، گوگل معرفی کرده است روباتیک جمینی، مجموعه ای از مدلها که به طور دقیق برای روباتیک توسعه یافته اند و هوش مصنوعی تجسم یافتهبشر ساخته شده جمینی 2.0 ، این مدل های هوش مصنوعی استدلال پیشرفته هوش مصنوعی را با دنیای فیزیکی ادغام می کنند تا روبات ها بتوانند طیف گسترده ای از کارهای پیچیده را انجام دهند.
درک روباتیک جمینی
Robotics Gemini یک جفت مدل AI است که بر اساس پایه Gemini 2.0 ساخته شده است ، یک هنر مدل Vision-Language (VLM) قادر به پردازش متن ، تصاویر ، صدا و فیلم. روباتیک جمینی در واقع گسترش VLM به Vision-Language-Action (VLA) مدل ، که به مدل جمینی اجازه می دهد نه تنها ورودی های بصری را درک و تفسیر کند و دستورالعمل های زبان طبیعی را پردازش کند بلکه اقدامات فیزیکی را در دنیای واقعی انجام دهد. این ترکیب برای روباتیک بسیار مهم است ، و این امکان را فراهم می کند که دستگاه ها نه تنها محیط خود را ببینند بلکه آن را در زمینه زبان انسانی درک کنند و ماهیت پیچیده ای از کارهای دنیای واقعی را از آن استفاده کنند ، از دستکاری شیء ساده گرفته تا فعالیت های پیچیده تر.
یکی از نقاط قوت اصلی روباتیک جمینی در توانایی آن در تعمیم انواع کارها بدون نیاز به آموزش گسترده است. این مدل می تواند دستورالعمل های واژگان باز را دنبال کند ، با تغییرات در محیط تنظیم شود و حتی وظایف پیش بینی نشده ای را انجام دهد که جزئی از داده های آموزش اولیه آن نبودند. این امر به ویژه برای ایجاد روبات هایی که می توانند در محیط های پویا و غیرقابل پیش بینی مانند خانه ها یا تنظیمات صنعتی فعالیت کنند ، بسیار مهم است.
استدلال تجسم یافته
یک چالش مهم در رباتیک همیشه شکاف بین بوده است استدلال دیجیتالی وت تعامل جسمیبشر در حالی که انسان به راحتی می تواند روابط مکانی پیچیده را درک کند و یکپارچه با محیط اطراف خود تعامل داشته باشد ، روبات ها برای تکرار این توانایی ها تلاش کرده اند. به عنوان مثال ، روبات ها در درک خود از پویایی مکانی ، سازگاری با موقعیت های جدید و رسیدگی به تعامل غیرقابل پیش بینی در دنیای واقعی محدود هستند. برای پرداختن به این چالش ها ، روباتیک جمینی شامل “استدلال تجسم یافته” است ، فرآیندی که به سیستم اجازه می دهد تا با دنیای فیزیکی به روشی شبیه به نحوه انجام انسان درک و تعامل داشته باشد.
برخلاف استدلال هوش مصنوعی در محیط های دیجیتال ، استدلال تجسم شامل چندین مؤلفه مهم است ، مانند:
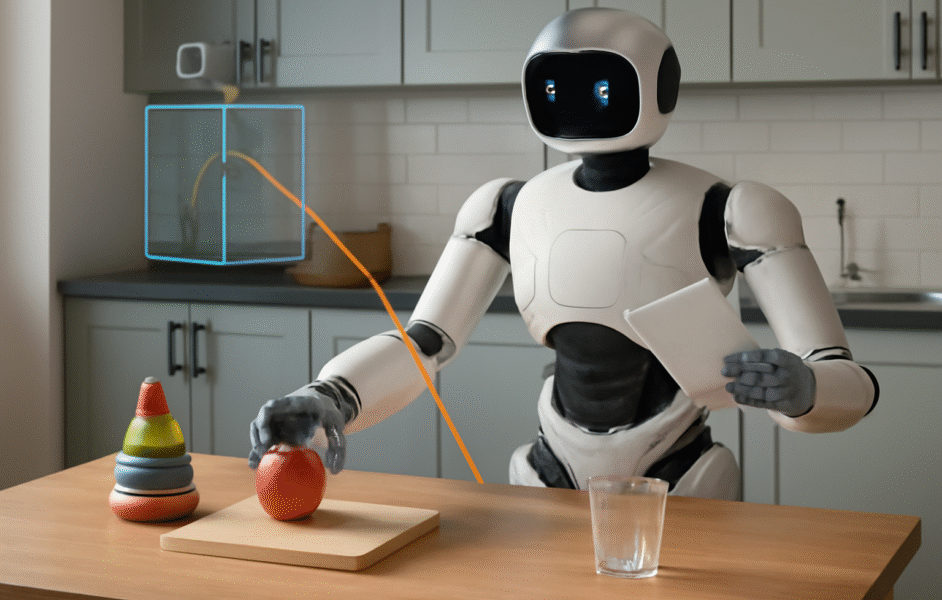
- تشخیص و دستکاری شیء: استدلال تجسم یافته ، روباتیک های جمینی را قادر می سازد تا اشیاء موجود در محیط خود را شناسایی و شناسایی کنند ، حتی اگر قبلاً دیده نشوند. این می تواند پیش بینی کند که در کجا می توان اشیاء را درک کرد ، وضعیت آنها را تعیین کرد و حرکاتی مانند کشوهای باز ، ریختن مایعات یا کاغذ تاشو را اجرا کرد.
- پیش بینی مسیر و درک: استدلال تجسم یافته ، روباتیک های جمینی را قادر می سازد تا کارآمدترین مسیرها را برای حرکت پیش بینی کرده و نقاط بهینه را برای نگه داشتن اشیاء شناسایی کنند. این توانایی برای کارهایی که نیاز به دقت دارند ضروری است.
- درک سه بعدی: استدلال تجسم یافته روبات ها را قادر می سازد فضاهای سه بعدی را درک و درک کنند. این توانایی به ویژه برای کارهایی که نیاز به دستکاری مکانی پیچیده دارند ، مانند لباس تاشو یا مونتاژ اشیاء بسیار مهم است. درک 3D همچنین روبات ها را قادر می سازد در کارهایی که شامل مکاتبات سه بعدی چند منظوره و پیش بینی جعبه محدودیت سه بعدی است ، برتری داشته باشند. این توانایی ها می تواند برای روبات ها برای انجام دقیق اشیاء بسیار حیاتی باشد.
مهارت و سازگاری: کلید کارهای دنیای واقعی
در حالی که تشخیص و درک شیء بسیار مهم است ، چالش واقعی روباتیک در انجام کارهای چرمی که به مهارت های حرکتی خوبی نیاز دارند ، نهفته است. این که آیا این یک فاکس اریگامی را تاشو می کند یا بازی کارت بازی می کند ، کارهایی که به دقت و هماهنگی بالایی نیاز دارند ، به طور معمول فراتر از توانایی اکثر سیستم های هوش مصنوعی است. با این حال ، روباتیک جمینی به طور خاص برای برتری در چنین کارهایی طراحی شده است.
- مهارت های حرکتی خوب: توانایی مدل برای رسیدگی به کارهای پیچیده مانند لباس تاشو ، انباشت اشیاء یا بازی کردن ، نشان دهنده مهارت پیشرفته آن است. با تنظیم دقیق اضافی ، روباتیک جمینی می تواند وظایفی را که نیاز به هماهنگی در چندین درجه آزادی دارند ، مانند استفاده از هر دو بازو برای دستکاری های پیچیده انجام دهند.
- یادگیری چند عکس: روباتیک جمینی همچنین مفهوم یادگیری چند عکس را معرفی می کند و به آن امکان می دهد کارهای جدید را با حداقل تظاهرات بیاموزد. به عنوان مثال ، با تعداد کمی از 100 تظاهرات ، روباتیک جمینی می تواند یاد بگیرد که یک کار را انجام دهد که در غیر این صورت ممکن است به داده های آموزشی گسترده ای نیاز داشته باشد.
- تطبیق با تجسم های رمان: یکی دیگر از ویژگی های اصلی Robotics Gemini ، توانایی آن در تطبیق با تجسم های جدید ربات است. این که آیا این یک ربات دو بازوی یا یک انسان دوستانه با تعداد بیشتری از اتصالات است ، این مدل می تواند یکپارچه انواع مختلفی از بدنهای روباتیک را کنترل کند ، و آن را متنوع و سازگار با تنظیمات سخت افزاری مختلف می کند.
کنترل صفر و سازگاری سریع
یکی از ویژگی های برجسته روباتیک جمینی ، توانایی آن در کنترل روبات ها در یک است یادگیری صفر یا چند ضربه ای روش کنترل صفر-شات به توانایی انجام وظایف بدون نیاز به آموزش خاص برای هر کار جداگانه اشاره دارد ، در حالی که یادگیری چند شات شامل یادگیری از یک مجموعه کوچک از نمونه ها است.
- کنترل صفر از طریق تولید کد: روباتیک جمینی می تواند کد را برای کنترل روبات ها ایجاد کند ، حتی اگر اقدامات خاص مورد نیاز قبلاً هرگز دیده نشده باشد. به عنوان مثال ، هنگامی که توضیحات کار در سطح بالا ارائه شده است ، جمینی می تواند با استفاده از قابلیت های استدلال خود برای درک پویایی و محیط فیزیکی ، کد مورد نیاز را برای اجرای کار ایجاد کند.
- یادگیری چند عکس: در مواردی که کار به مهارت پیچیده تری نیاز دارد ، این مدل همچنین می تواند از تظاهرات یاد بگیرد و بلافاصله از آن دانش برای انجام کار مؤثر استفاده کند. این توانایی سازگاری سریع با موقعیت های جدید پیشرفت قابل توجهی در کنترل روباتیک است ، به خصوص برای محیط هایی که نیاز به تغییر مداوم یا غیرقابل پیش بینی بودن دارند.
پیامدهای آینده
روباتیک جمینی یک پیشرفت حیاتی برای روباتیک های عمومی است. با ترکیب قابلیت های استدلال هوش مصنوعی با مهارت و سازگاری روبات ها ، ما را به هدف ایجاد روبات هایی نزدیک می کند که می توانند به راحتی در زندگی روزمره ادغام شوند و کارهای مختلفی را که نیاز به تعامل مانند انسان دارند انجام دهند.
کاربردهای بالقوه این مدل ها بسیار گسترده است. در محیط های صنعتی ، روباتیک جمینی می تواند برای مونتاژ پیچیده ، بازرسی ها و کارهای نگهداری استفاده شود. در خانه ها می تواند به کارهای ، مراقبت و سرگرمی شخصی کمک کند. از آنجا که این مدل ها به پیشرفت خود ادامه می دهند ، احتمالاً روبات ها به فناوری های گسترده تبدیل می شوند که می توانند امکانات جدیدی را در بخش های مختلف باز کنند.
خط پایین
Robotics Gemini مجموعه ای از مدل های ساخته شده در Gemini 2.0 است که برای انجام این کار روبات ها برای انجام استدلال تجسم یافته طراحی شده است. این مدل ها می توانند به مهندسین و توسعه دهندگان در ایجاد روبات های دارای هوش مصنوعی کمک کنند که می توانند به شیوه ای مانند انسان با دنیای فیزیکی درک و تعامل داشته باشند. با استفاده از توانایی انجام کارهای پیچیده با دقت و انعطاف پذیری بالا ، روباتیک جمینی شامل ویژگی هایی مانند استدلال تجسم یافته ، کنترل صفر و یادگیری چند شات است. این قابلیت ها به روبات ها اجازه می دهد تا بدون نیاز به آموزش گسترده ، با محیط خود سازگار شوند. روباتیک های جمینی پتانسیل تبدیل صنایع را از تولید به کمک خانه دارند و باعث می شوند روبات ها در کاربردهای دنیای واقعی توانمندتر و ایمن تر شوند. با ادامه این مدل ها ، آنها می توانند آینده روباتیک را دوباره تعریف کنند.